|
Magnetometer Viby Viby (Sollentuna), Sweden · geographic coordinates: 59°27' N 17°54 E · geomagnetic coordinates (2017): 57.69°N, 106.22°E |
|
|
| |
|
The device
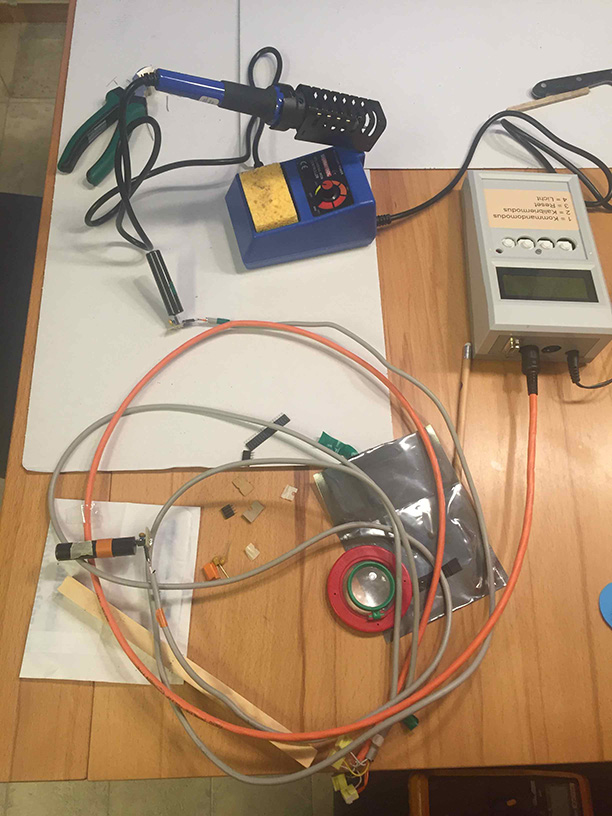
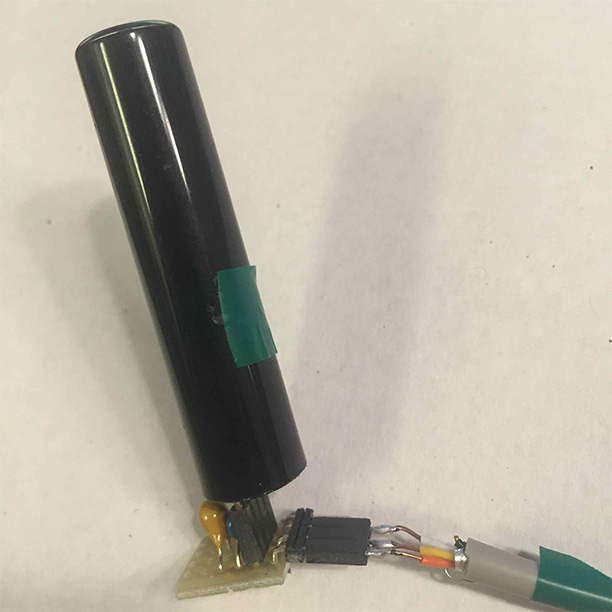
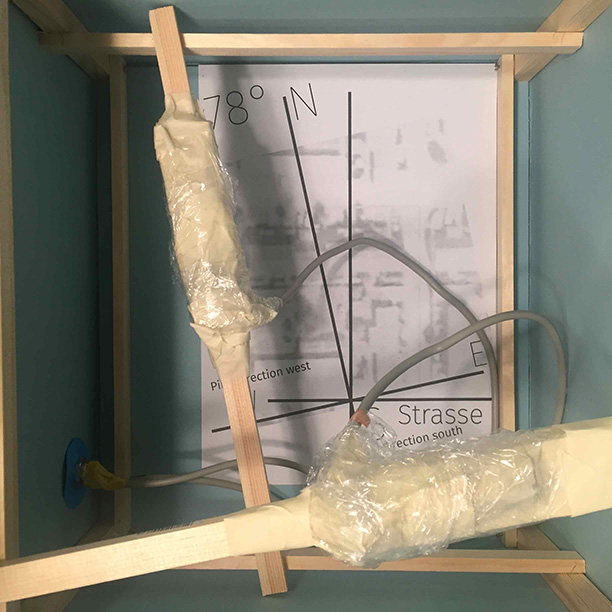
SAM Viby facilitates Speake & Co Llanfapley FGM-3 fluxgate sensors for measuring the local magnetic field. The magnetometer is located in Viby (Sollentuna), about 15 km North of Stockholm.
Geographic coordinates: 59o27min N 17o54min E
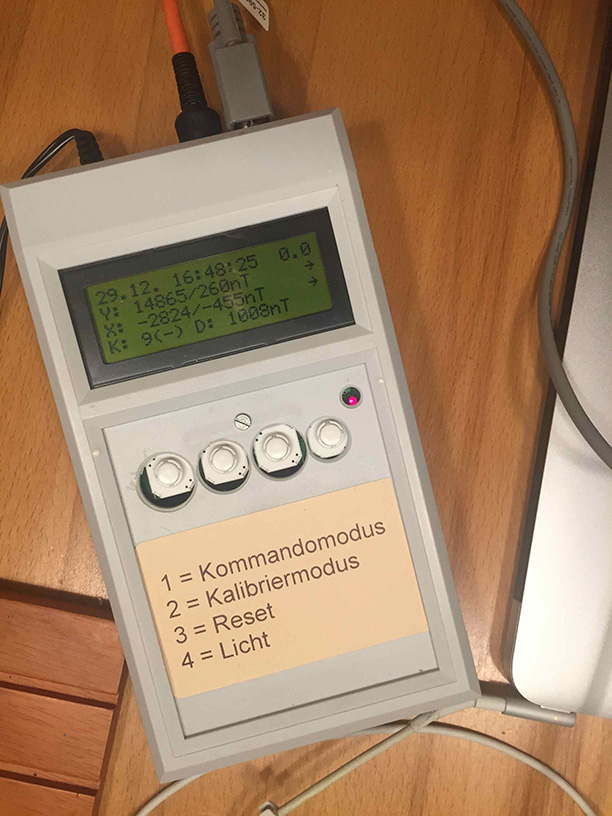
Magnetic declination: 5 57.60' East (IGRF-12 Model , 2015) Construction and installation of the instrument After a successful maintenance of SAM Haimhausen, a magnetomete which I am running 20 km north of Munich, Germany, I decided to install a magnetometer close to my residence north of Stockholm. Just some kilometers off the 60th parallel, this location with about 10 northern light occurrences every seasoa seems well suited for geomagnetic measurements. Ralf Pitscheneder generously donated his 2-axis SAM magnetometer for further use as SAM Viby. This magnetometer was operated from 2004-2010 in Munich as well. We have brought it to Sweden and installed it end of 2016. The device now takes measurements in a preliminary, yet stable configuration. The two magnetic field sensors were reused and installed in a 50-liter cartboard box in my storage, which features reasonable temperature stability (the magnetic field sensors are quite sensitive to temperature changes on the 0.1 degree Centigrade level). The location is as magnetically quiet as a suburban neighborhood can be, but SAM Viby is powerful software tools to counteract effects of man-made disturbances on the measurements. Recently, the observatory was fitted with temperature sensors, and I have plans to improve temperature insulation of the observatory using styrofoam detector holders and embedding the setup in an aluminum shield filled with styrofoam spheres (which are produced by a local chap). On the scientific side, the observatory currently reads the two horizontal components of the Earth's magnetic field. The accuracy of the relative measurements is given by ±1-2 nT (sensor accuracy), and probably ≈5 nT man-made disturbances. Relative measurements are relevant for producing alerts for northern lights observations. SAM Viby also does absolute magnetic field measurements. These are currently calibrated using the WMM2015 model which is evaluated on daily basis. The model bears uncertainties of ≈135 nT in each coordinate. An immediate upgrade will be to equip SAM Viby with a third fluxgate sensor as to measure also the horizontal component of the magnetic field. | |
|
Some pictures of the magnetometer. More thorough documentation to come soon. 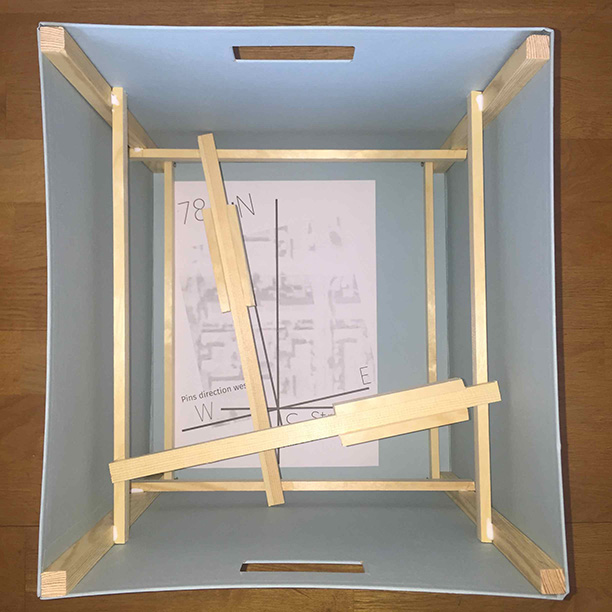

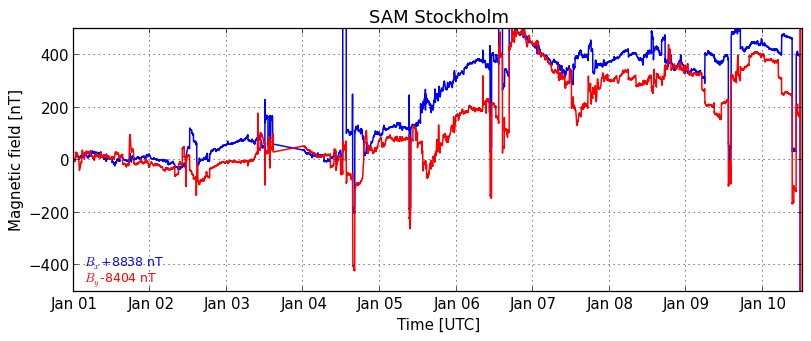
Some diagnostic plots
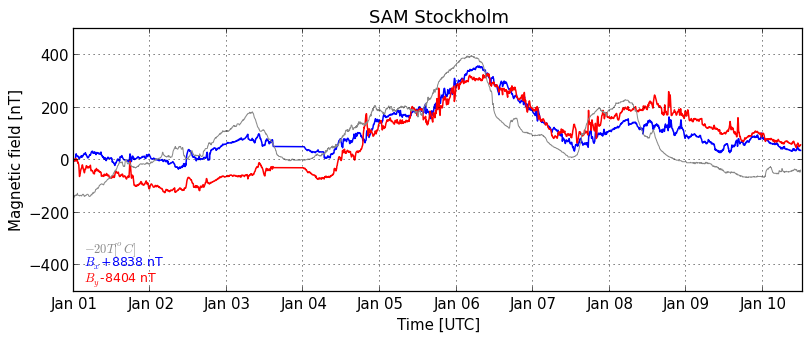
A first trial to assess the temperature dependence of the measurements:
This plot shows the magnetic flux vs. the ambient outdoor temperature. Dedicated temperature sensors directly at the fluxgate sensors will be installed soon.
Darrel Emerson did exhaustive tests on the charateristics, thermal dependencies and thermal and long-term effects
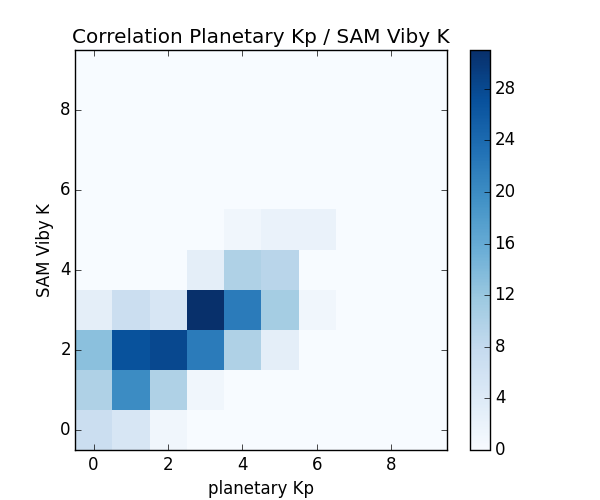
A first, 27-day correlation vs planetary Kp:
Calibrating the local K scale: In his Geomagnetism Tutorial, Whitham Reeve describes a method suggested by Dirk Lummerzheim to develop a K-index scale for a particular station:
| |